A Robot That Grows
At first glance, robots would appear to have exactly nothing in common with sweet peas or other climbing vines. Yet thanks to some innovative scientists, they now share at least one trait: the ability to extend their reach.
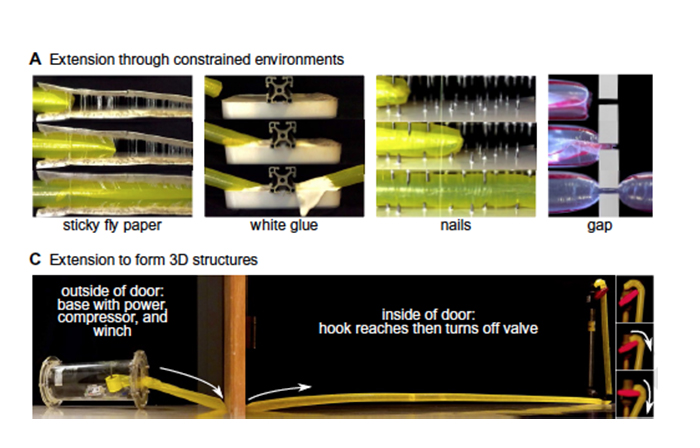
Inspired by the growing action of plants and other living things, researchers at UC Santa Barbara and Stanford University have developed a tubular robot that — much like a sweet pea — navigates its environment by extending its tip and controlling its growing direction based on what it senses externally. Such a machine lends itself well to a variety of purposes in constrained environments, from clearing arterial blockages to tunneling through rubble for search and rescue operations.
“When you think about robots today, the majority of them are in the world of factories,” said UCSB mechanical engineer Elliot Hawkes. “But there’s a big push right now to see if we can create robots that could actually live and help out in the human world.” Robots, known for their precision and consistent, repeatable action in highly controlled spaces, are now being explored for their potential to work under variable circumstances. For instance, said Hawkes, these so-called “soft” robots may adapt their actions to the presence of obstacles (including humans) or change shape to interact in a variety of spaces. Research on this project, titled “A soft robot that navigates its environment through growth,” appears in the journal Science Robotics.
While much research has been done on robot locomotion, from rolling to flying and even animal-inspired walking, a robot that elongates and extends is a fairly new challenge for mechanical engineers. The design of this particular soft robot was inspired by nature, specifically by trailing vines and fungal hyphae, and even by nerve cells, all of which grow from their tips.
“In the cases where nature uses this type of movement to go somewhere, it’s often trying to create a structure which it can then use,” Hawkes said. Neurons form conduits that can transport signals between brain and organs, tip-growing cells in the stalk of a plant can support it against wind and rain, and fungal hyphae can transport nutrients.
That principle is the same with the researchers’ growing robot. It creates its form via pneumatic pressure from within, similar to an inflating balloon, allowing for the transport of things inside it.
“Pressure is the driving force,” Hawkes said. However, unlike an inflating balloon, the pressure does not cause expansion along the length of its body but rather unfurls it at the tip (think of a party blower), eliminating sliding friction between the body and the environment. That was a major priority for the researchers as they sought to develop this proof-of-concept.
“It helps these robots get through really constrained environments because there isn’t any sliding,” explained Hawkes, who with his colleagues is investigating this technology’s potential for endovascular surgery. With conventional techniques, a catheter is inserted into an arterial system — often in the larger artery in the leg — but as it is pushed along may encounter narrower vessels that become more convoluted.
“At some point you might run into this limit,” Hawkes said. Too soft a catheter and it will buckle; too stiff and it may poke through the blood vessel wall. With a soft robot that grows, not only can the tip navigate the different twists and turns of the vascular system, but it also can adapt to smaller diameters as needed without excess wear on the delicate tissue of the blood vessel — all the while pulling along the catheter needed to complete the procedure.
On a larger scale, a similar robot could be used in search-and-rescue operations to thread its way through rubble left by collapsed buildings to deliver water to those trapped underneath, with minimal disturbance to the unstable wreckage. Or, it could be used to route cables, wires and hoses between walls and through less accessible spaces during construction.
The technology is still in its very early stages, as Hawkes and his Stanford colleagues work to make the robot more robust and functional under an array of circumstances.
“We have a vision of rescue workers using hundreds of these things because they’re just air and plastic,” Hawkes said. The researchers are looking into equipping the robots with various sensors that can, for example, sample the air or relay images of the material they are traveling through.
Research on this project was conducted also by Laura H. Blumenschein, Joey D. Greer and Allison M. Okamura at Stanford University.
Share this article
Related Stories



